
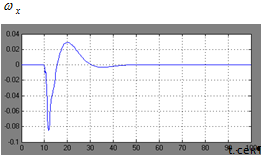
В случае ненулевого бокового ветрового воздействия (![]() ) и отсутствия отклонения по боковому пути (
) и отсутствия отклонения по боковому пути (![]() ), то есть в случае установившегося движения, переходные процессы в моделируемой системе управления будут выглядеть следующим образом
), то есть в случае установившегося движения, переходные процессы в моделируемой системе управления будут выглядеть следующим образом
|

Рис.1.3.2.11. Переходный процесс в контуре демпфирования при боковом ветровом воздействии
| |
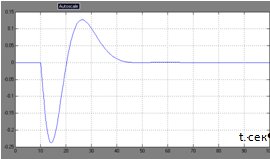
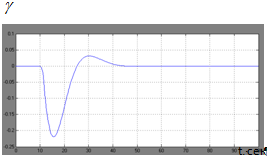
Рис.1.3.2.13 Переходный процесс в контуре стабилизации по углу пути при боковом ветровом воздействии
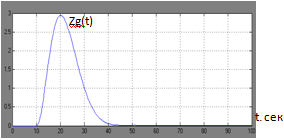
Рис. 1.3.2.14 Переходный процесс в контуре стабилизации отклонения по боковому пути при боковом ветровом воздействии
Таким образом, по результатам моделирования получается, что найденный линейный регулятор является оптимальным. Система автоматического управления БЛА, построенная на его основе, обладает устойчивостью и управляемостью.
Сформированный контур управления боковым движением БЛА обеспечивает устойчивое сведение к нулю установившихся значений по угловой скорости крена, углам крена, пути и боковому отклонению от пути при воздействии ветра. Это отвечает требованиям по заходу на посадку.
Другое по теме:
Технический ремонт автомобильного стартера
Система запуска двигателя, как следует из названия, предназначена для
запуска двигателя автомобиля. Система обеспечивает вращение двигателя со
скоростью, при которой происходит его запуск.
На современных автомобилях наибольшее распространение получила стартерная
система запуска. Систем ...
Комплексная автоматизация автотранспортного предприятия
Ведущие компании
мира давно осознали, что достижение успеха в конкурентной борьбе на различных рынках
невозможно без использования современных информационных технологий. В то же время,
все прекрасно понимают, что разработка законченного программного решения качественно
и в срок требует в ...
Проект тележки электромостового крана общего назначения
Грузоподъемные и транспортирующие машины являются
неотъемлемой частью современного производства, так как с их помощью
осуществляется механизация основных технологических процессов и вспомогательных
работ. В поточных и автоматизированных линиях роль подъемно-транспортных машин
качественно ...