
Графики переходных процессов электропривода рулевого устройства строятся для случая хода судна по курсу, т.е для изменения угла перекладки пера руля от 0![]() до 6÷7
до 6÷7![]() .
.
![]() (6.1)
(6.1)
![]() - для разгона; (6.2)
- для разгона; (6.2)
![]() - для торможения; (6.3)
- для торможения; (6.3)
где ![]() - механическая характеристика двигателя в двигательном и тормозном режимах;
- механическая характеристика двигателя в двигательном и тормозном режимах;
![]() - характеристика момента сопротивления при разгоне от α=0 до α=(6÷7)
- характеристика момента сопротивления при разгоне от α=0 до α=(6÷7)![]() .
.
Зависимость, связывающая время разгона и приращение угловой скорости:
![]() (6.4)
(6.4)
где ![]()
![]() - среднее значение динамического момента на участке от
- среднее значение динамического момента на участке от ![]() до
до ![]() ;
;
![]() - приращение угловой скорости на каждом участке.
- приращение угловой скорости на каждом участке.
График изменения момента во времени строится исходя из полученной кривой ![]() . Кривые переходных процессов видно на рис 1
. Кривые переходных процессов видно на рис 1
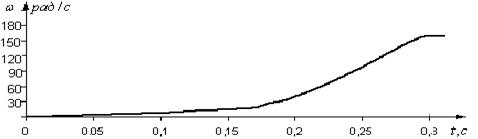
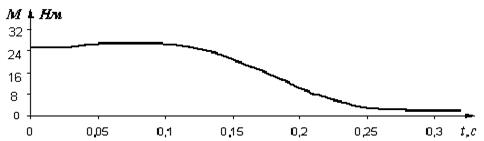
Рис 6.1 Переходные процессы при разгоне электродвигателя рулевого устройства
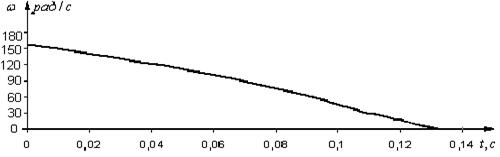
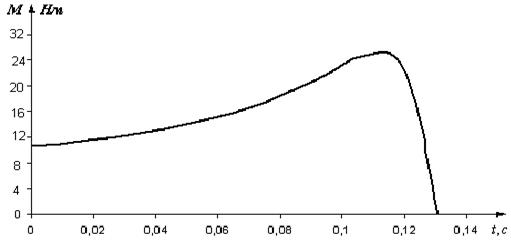
Рис 6.1 Переходные процессы при торможении электродвигателя рулевого устройства
Другое по теме:
Ремонт генераторов переменного тока
Ремонт автомобилей представляет собой комплекс операций
по восстановлению исправности автомобилей или работоспособности автомобилей и
восстановлению ресурса автомобилей и его составных частей.
Техническая политика в области поддержания
работоспособности автомобилей основана на планово- ...
Расчет четырехосного вагона-цистерны для перевозки сжиженных газов
Проведены расчеты по выбору основных технико-экономических параметров
грузового вагона, а именно по определению грузоподъемности, линейных размеров
вагона; вписыванию вагона в габарит; нагрузкам, действующим на вагон и его
части; по устойчивости колесной пары против схода с рельса; оси ко ...
Организация автомобильных перевозок и безопасность движения
Таблица 1 -
Исходные данные
Вид
груза
Грузо-
отправитель
Наличие
груза, т.
Грузо-
получатель
Потребность
в грузе, т
Koэф-т выпуска а
Время
в
наряде
Тн ч
Известняк
...