
Система дистанционной отдачи якоря является одним из элементов улучшения маневренности судна и безопасности мореплавания. Отдача якоря может производиться или для постановки судна на якорь, или для его экстренного торможения провисающей якорной цепью в ситуации, близкой к аварийной. В обоих случаях отдача производится под действием собственной массы якоря без участия электропривода. При отдаче якоря важными элементами контроля являются: длина вытравленной цепи и скорость, определяющая динамику процесса и нагрузку якорного механизма. В схеме дистанционного управления механизм якорной приставки выполнен фирмами ПНР, а электрооборудование укомплектовано предприятием «Шиффс-электроник» (ГДР).
Кинематический механизм
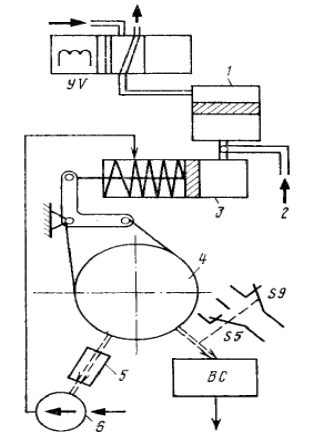
Рис.14.1 Кинематическая схема дистанционной отдачи якоря
Включает в себя ленточный стопор 4, накладываемый на тормозной барабан, связанный с якорной звездочкой. Управление стопором осуществляется штоком силового гидропривода 3 через соответствующий поворотный рычаг. Полость нагнетания силового цилиндра связана с пневмогидравлическим бустером 1, имеющим изолированную систему заполнения маслом 2, снабженную необходимыми отсечными клапанами. Верхняя воздушная полость бустера сообщается через электромагнитный золотник УV с судовой воздушной магистралью постоянного рабочего давления.
При подаче питания на электромагнит воздух поступает в бустер, который перегоняет масло в рабочий цилиндр, перемещающийся при этом шток рабочего цилиндра освобождает ленточный стопор. Происходит отдача якоря. Вращающаяся якорная звездочка через роликовую муфту 5 связана с шестеренчатым насосом 6, который при повышении частоты вращения увеличивает давление в противоположной полости рабочего цилиндра. Увеличение скорости отдачи способствует притормаживанию привода. Контур шестеренчатого насоса представляет собой отрицательную обратную связь, способствующую регулированию постоянства скорости отдачи якоря на выбранном безопасном уровне.
Роликовая муфта 5 обеспечивает направленное вращение шестеренчатого насоса только в сторону спуска якоря.
С якорной звездочкой через промежуточную механическую передачу связан сельсин-датчик ВС, через который ведется дистанционный контроль за длиной вытравленной цепи. Каждый градус поворота сельсина соответствует изменению длины якорной цепи на 1 м. На оси сельсина ВС имеются два профильных кулачка, каждый из которых воздействует на свой микровыключатель S5 и S9. Элемент S5 переключается, когда якорь приспущен на 2 м и готов к отдаче, а элемент S9 разрывает свой контакт в случае, когда вытравлена вся якорная цепь.
Электрическая схема управления
Опишем работу схемы при отдаче якоря с пульта управления из рулевой рубки, где располагаются все основные электротехнические средства схемной автоматики.
Выключателем S1 подается переменный ток напряжением 127 В на элементы контроля и постоянный ток напряжением 24 В на элементы управления. Наличие тока контролируется реле напряжения К7, которое подключает сигнальную лампу H1 и изготавливает цепь работы управляющего электромагнитного золотника УV. Лампа H1 одновременно освещает шкалы заданной и действительной длины вытравленной цепи. При готовности якоря к отдаче на местном пульте управления необходимо нажать кнопку S2. Реле К6 самоблокируется, включает сигнальную лампу готовности Н2. Заданная длина якорной цепи контролируется контактом микровыключателя S3, который управляется кулачковой шайбой на валу сельсина-указателя длины BE. Необходимая длина травления устанавливается специальной рукояткой, утопив которую, освобождают конический фрикцион, связывающий кулачковую шайбу и ось сельсина BE. Поворот кулачка наблюдается по специальной шкале заданной длины. При нажатии кнопки предварительного спуска S4 включаются реле К1 и КЗ, которые вводят в действие электромагнит пневматического золотника. Реле К4 включает лампу Н4 начала отдачи якоря. Как только вытравится более 2м якорной цепи, произойдет переключение путевого выключателя S5, который отключит реле К7 и подключит К8.
Сигнальная лампа готовности Н2 погаснет, включится лампа НЗ «Якорь приспущен». Кнопка S4 может быть отпущена. Для автоматической контролируемой отдачи якоря необходимо нажать кнопку S6 (S7 —дублирующая кнопка на баке). Промежуточное реле К2 включит управляющее реле S5, которое самоблокируется и обеспечивает питание цепей К1, УV. Ленточный стопор освобождается, происходит свободная отдача якоря с регулируемой скоростью. В любой момент времени процесс может быть прерван нажатием кнопки S8 «Стоп» (S10—тождественная кнопка на баке). При достижении установленной длины якорной цепи отключаются S3 и реле К5. Отдача якоря прекращается. Микропереключатель S9 отключает схему управления, когда якорная цепь будет полностью на клюзе. Исчезновение питающего напряжения переменного тока отключает систему контроля положения якоря. Управляющая часть энергетически обеспечивается батареей 24 В, что в целом повышает живучесть рассматриваемой схемы. Цепь контроля получает питание от сети 220 В через понижающий трансформатор 220/127В
Другое по теме:
Влияние конструктивных и эксплуатационных факторов на технико-экономические показатели машин
Значительный рост всех
отраслей народного хозяйства требует перемещения большого количества грузов и
пассажиров. В системе машин для комплексной механизации сельскохозяйственного
производства тракторы и автомобили – мобильные энергетические и транспортные
средства.
Тракторы предназнач ...
Определение неисправностей тормозной системы автомобиля с помощью стенда диагностики тормозной системы
Тормозная система является
одной из важнейших систем автомобиля. Ее необходимо своевременно
диагностировать и осматривать. При диагностике тормозных систем автомобилей
сначала выполняют диагностику. Позволяющую оценить техническое состояние
тормозной системы автомобиля в целом по значени ...
Анализ функционирования систем автоматической посадки беспилотной авиации
Из всех режимов полета летательных
аппаратов (ЛА) наиболее сложным и напряженным является режим захода на посадку
и непосредственно посадки. Связано это, в первую очередь, с большой степенью
аварийности ЛА на этом режиме, вследствие быстротечности процесса посадки и
очень высокой нервно- ...