
Выбор кинематической схемы: механизм передвижения тележки предполагается выполнить по кинематической схеме, показанной на рисунке 1.
Для передачи крутящего момента от двигателя к приводным колесам использован вертикальный редуктор ВК. Вал двигателя соединен с быстроходным валом редуктора зубчатой муфтой, на одной половине которой установлен колодочный тормоз. Эта схема может передавать достаточно большие крутящие моменты; имеет закрытые зубчатые передачи, что обеспечивает долговечность и надёжность работы механизма.
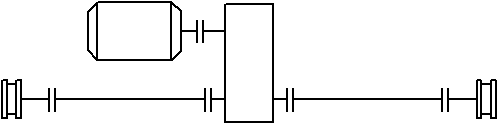
Рисунок 1 – Кинематическая схема механизма передвижения
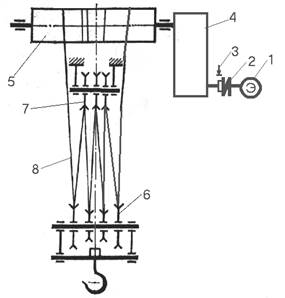
Рисунок 2 – Кинематическая схема механизма подъема груза
1 – двигатель; 2 – муфта; 3 – тормоз; 4 – редуктор; 5 – барабан; 6 – крюковая подвеска; 7 – верхние блоки; 8 – канат
Для проектируемого крана принимаем механизм подъема, схема которого представлена на рисунке 2.
В механизмах подъема с непосредственной навивкой каната на барабан обычно применяют сдвоенный полиспаст, при использовании которого обеспечивается вертикальное перемещение груза, одинаковая нагрузка на подшипники независимо от высоты подъема груза. Для крана грузоподъемностью 40т принимаем сдвоенный полиспаст кратностью а=4 [1, табл. 10, с. 55].
Для определения максимального усилия в канате, необходимо определить КПД полиспаста:
 ,
,
где ![]() бл=0,97 0,98 – КПД блока на подшипниках качения;
бл=0,97 0,98 – КПД блока на подшипниках качения;
 .
.
Максимальное натяжение в канате, набегающем на барабан, при подъеме груза определяют по формуле:
 ,
,
Где g – ускорение свободного падения, g=9,8 м/с2;
![]() - грузоподъемность крана.
- грузоподъемность крана.
 кН,
кН,
Выбора каната осуществляется исходя из условия:
![]()
где Sp – расчетное усилие в канате, Н;
Spазр – разрывное усилие каната (табличное значение),
kз – коэффициент запаса прочности каната, зависящий от режима работы механизма (табл. 1).
Таблица 1 – Коэффициент запаса прочности каната
|
Режим работы |
1М, 2М, 3М |
4М |
5М, 6М |
|
kз |
5,0 |
5,5 |
6,0 |
![]()
Выбираем канат из [1, стр. 453, приложение I I], двойной свивки типа ЛК-3 6x19(1+6+6/6)+1 о.с. с параметрами: диаметр каната dк=22,5 мм, разрывное усилие Sразр=270000 Н, площадь поперечного сечения F=187,03 мм2.
Другое по теме:
Анализ функционирования систем автоматической посадки беспилотной авиации
Из всех режимов полета летательных
аппаратов (ЛА) наиболее сложным и напряженным является режим захода на посадку
и непосредственно посадки. Связано это, в первую очередь, с большой степенью
аварийности ЛА на этом режиме, вследствие быстротечности процесса посадки и
очень высокой нервно- ...
Технический ремонт автомобильного стартера
Система запуска двигателя, как следует из названия, предназначена для
запуска двигателя автомобиля. Система обеспечивает вращение двигателя со
скоростью, при которой происходит его запуск.
На современных автомобилях наибольшее распространение получила стартерная
система запуска. Систем ...
Влияние конструктивных и эксплуатационных факторов на технико-экономические показатели машин
Значительный рост всех
отраслей народного хозяйства требует перемещения большого количества грузов и
пассажиров. В системе машин для комплексной механизации сельскохозяйственного
производства тракторы и автомобили – мобильные энергетические и транспортные
средства.
Тракторы предназнач ...