
Для точной остановки двигателя должно быть предусмотрено его динамическое торможение. При напряжении постоянного тока подводится к любой из статорных обмоток. Переход на характеристику динамического торможения осуществляется с низшей скорости.
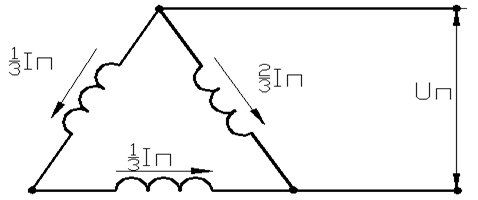
Рис 4.1 Схема подключения обмотки статора к источнику постоянного тока в режиме динамического торможения
Величина постоянного тока определяется по формуле
![]()
![]()
Величина эквивалентного тока обычно задаются
![]()
![]()
Номинальное значение тока холостого хода двигателя определяется по формуле
 (4.1)
(4.1)
где ![]() - номинальный коэффициент мощности двигателя;
- номинальный коэффициент мощности двигателя;
![]() - критическое скольжение.
- критическое скольжение.
![]()
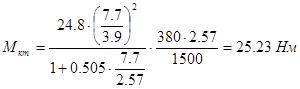
Максимальное значение тормозного момента определяется по формуле
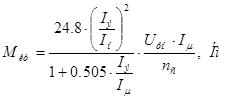 (4.2)
(4.2)
где ![]() - номинальное фазное напряжение питающей сети переменного тока;
- номинальное фазное напряжение питающей сети переменного тока;
![]() - синхронная частота вращения электродвигателя;
- синхронная частота вращения электродвигателя;
![]() - номинальное значение тока холостого хода двигателя;
- номинальное значение тока холостого хода двигателя;
![]() - эквивалентный ток.
- эквивалентный ток.
Величина тока ротора приведенного к статору определяется по формуле
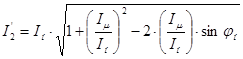 (4.3)
(4.3)
где ![]() - ток ротора приведенного к статору.
- ток ротора приведенного к статору.

Величина сопротивление ротора, приведенное к обмотке статора определяется по формуле:
![]() (4.4)
(4.4)
где ![]() - синхронная частота вращения электродвигателя;
- синхронная частота вращения электродвигателя;
![]()
Относительная скорость рассчитывается по формуле:
 (4.5)
(4.5)
где ![]() - сопротивление ротора, приведенное к обмотке статора, Ом
- сопротивление ротора, приведенное к обмотке статора, Ом
![]()
Характеристика динамического торможения строится по формуле Клосса:
 (4.6)
(4.6)
где ![]() - текущее значение относительной скорости;
- текущее значение относительной скорости;
![]() - максимальное значение тормозного момента.
- максимальное значение тормозного момента.
![]() - относительная скорость, при котором значение тормозного момента максимальное.
- относительная скорость, при котором значение тормозного момента максимальное.
Далее идет построение характеристики динамического торможения
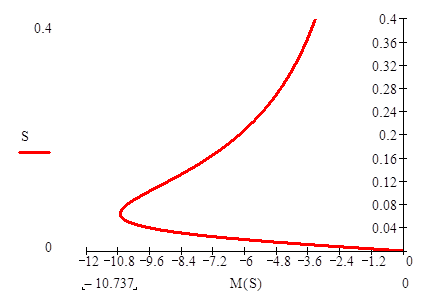
Рис 4.2 Динамическое торможение асинхронного двигателя с коротко замкнутым ротором
Другое по теме:
Технико-экономическая эксплуатация транспорта
Управление транспортом в процессе физического движения
товаров на пути от производителя к потребителям через сформированные
логистические каналы распределения состоит в последовательном решении следующих
задач:
1. Выбор вида транспорта и определение мест и способов
перевалки грузов с ...
Основы организации перевозок на железных дорогах
В теории и практике грузовой
коммерческой работы железных дорог происходят существенные качественные
изменения, которые являются логическим следствием ускорения темпов технического
прогресса. Расширена сфера применения электронно-вычислительной технике решения
задач планирование перевозо ...
Бухгалтерский учет ГСМ и списание на затраты
Еще несколько лет тому
назад торговля горюче-смазочными материалами (ГСМ) была распространена в сфере
довольно узкого круга предприятий и организаций. Однако в настоящее время в
силу своей практически 100-процентной ликвидности и высокой рентабельности
данный вид предпринимательской деят ...