
Для проверки работоспособности и оптимальности спроектированного регулятора, необходимо было построить модель объекта управления, с помощью которой реализуется функциональная составляющая алгоритма, и проверить качество переходных процессов на устойчивость и управляемость системы управления.
Моделирование системы управления боковым движением БЛА проводилось в среде Simulink пакета MATLAB версии R2010b.
Simulink - интерактивный инструмент для моделирования, имитации и анализа динамических систем. Он дает возможность строить графические блок-диаграммы, имитировать динамические системы, исследовать работоспособность систем и совершенствовать проекты. Simulink полностью интегрирован с MATLAB, обеспечивая немедленным доступом к широкому спектру инструментов анализа и проектирования. Эти преимущества делают Simulink наиболее популярным инструментом для проектирования систем управления.
Моделирование системы управления без учета ветрового возмущения
Схема моделируемой системы управления в целом соответствует функциональной схеме бокового движения летательного аппарата, представленной на рисунке 1.3.2.4. Данная схема включает в себя несколько контуров, решающих различные функциональные задачи СУ. Вся СУ строится на основе иерархического подхода: сначала строится контур демпфирования, затем, на его основе, - система стабилизации заданного угла крена, затем, на их основе, - контур стабилизации заданного угла рысканья, и в самом конце – система стабилизации отклонения по боковому пути. Такое представление структурной схемы СУ боковым движением БЛА удобно тем, что каждая подсистема может быть статической или астатической, может рассматриваться полная или упрощенная её модель.
Построение контура демпфирования
Структурная схема рассматриваемого контура соответствует приведенной на рис. 1.3.2.1.
Система управления данным ЛА формирует управляющие сигналы в соответствии со следующими законами управления:

Где Zзад – заданное значение бокового отклонения ЛА от линии заданного пути.
Угловая скорость по крену ωх измеряется датчиком угловой скорости и через блок обратной связи ![]() поступает на вход усилителя
поступает на вход усилителя ![]() , где суммируется с сигналом заданной угловой скорости по крену.
, где суммируется с сигналом заданной угловой скорости по крену.
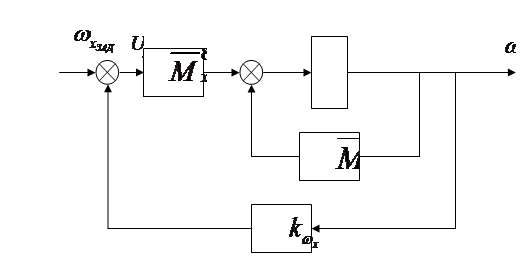
Рис.1.3.2.1 Структурная схема контура демпфирования
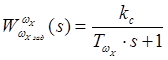
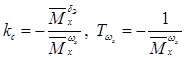
Передаточная функция разомкнутой системы по угловой скорости крена в случае идеального сервопривода при ненулевом входном воздействии ![]() представляется апериодическим звеном
представляется апериодическим звеном
|
 ,
,
|
 .
.
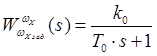
Тогда передаточная функция замкнутой системы будет иметь вид:
|
 ,
,
|
 .
.
Теоретически в системе могут быть получены сколь угодно быстрые переходные процессы регулирования. Однако, реально область допустимых параметров системы ограничена быстродействием исполнительного привода.
|
![]() .
.
Построение контура стабилизации крена
По аналогии с ранее рассмотренным построением контура демпфирования строится и контур стабилизации угла крена. Сигнал заданного угла крена ![]() формируется в вычислителе системы траекторного управления. На рис.1.3.2.2 показана исходная, а на рис. 1.3.2.3 – расчетная структурные схемы автомата стабилизации заданного угла крена.
формируется в вычислителе системы траекторного управления. На рис.1.3.2.2 показана исходная, а на рис. 1.3.2.3 – расчетная структурные схемы автомата стабилизации заданного угла крена.
|
Другое по теме:
Агрегатный участок
Эффективность использования
автотранспортных средств зависит от совершенства организации транспортного
процесса и свойств автомобилей сохранять в определенных пределах значения
параметров, характеризующих их способность выполнять требуемые функции. В
процессе эксплуатации автомобиля его ...
Экономические показатели работы автотранспортного предприятия
Для автомобилей-такси дневная выработка определяется в платных километрах
пробега и рублях выручки
(1.1)
где Lпл. -платный пробег автомобиля-такси за
сутки, км;
Для грузовых автомобилей, работающих из почасового расчета, автобусов
маршрутных и работаю по заказам и ...
Организация технического обслуживания и материально-технического обеспечения машинно-тракторного парка
Период перехода страны к рыночной
экономике, превратившийся для неё в новый сокрушительный революционный процесс,
обусловленный принятием монетарной модели реформирования, а не гибкой стратегии
преобразований, ориентированных на бережливое отношение к созданным
материальным и другим ценн ...